Index
1. 환경 설정
(1) VSCODE 설치
https://code.visualstudio.com/download
(2) .NET 8.0 SDK 설치
https://dotnet.microsoft.com/en-us/download/dotnet/8.0
(3) .NET 6.0 SDK 설치
https://dotnet.microsoft.com/ko-kr/download/dotnet/6.0
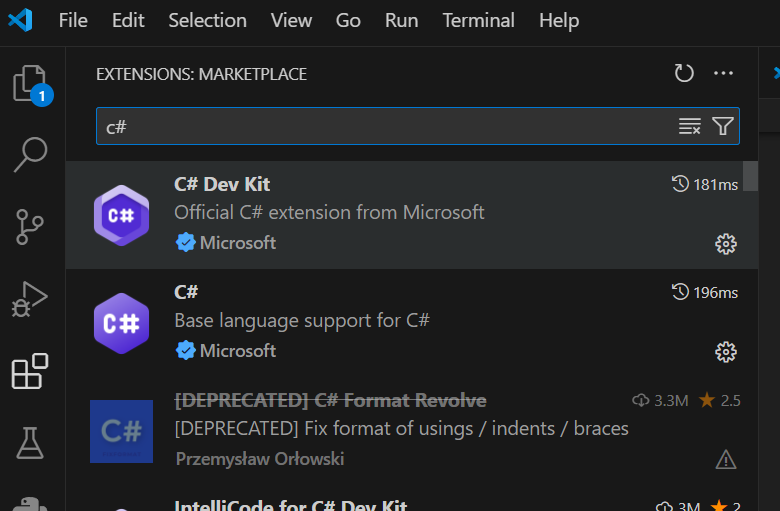
(4) VSCODE를 실행하고 C# extention 설치
(5) 소스 코드 다운로드
https://github.com/merschformann/RAWSim-O
Top
2. 빌드 방법
(1) vscode의 탐색창에서 Rawsimo 소스코드를 다운로드 바든 위치로 이동.
(2) ./RAWSim-O-main/RAWSimO.Visualization 폴더에서 마우스 오른쪽 버튼을 클릭하고 open in Integrated terminal를 실행.
(3) 터미널 창에서 dotnet run(필요시 dotnet restore 먼저 실행)

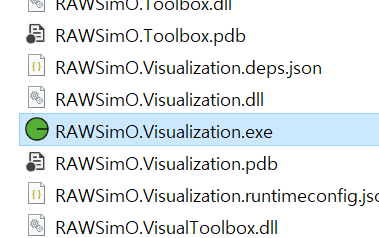
- 참고로 실행이 완료되면 bin\Debug\net6.0-windows 폴더에 실행파일(exe)도 생성됨.
Top
3. 실행 화면 구성
(1) Base Controls
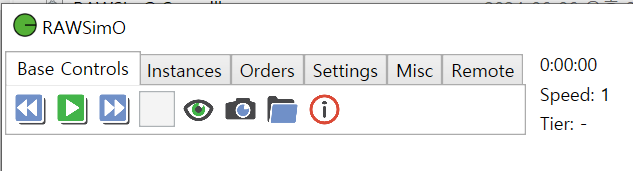
- 재생 버튼: 시뮬레이션 시작
- 눈 모양 버튼: 2D와 3D모드 변환
- 실행하면 사전에 설정된 파라미터 값을 토대로 시뮬레이션 그래픽이 나타난다. 오른쪽에는 대쉬보드가 있어서 운영현황을 파악할 수 있다.
(2) Instances
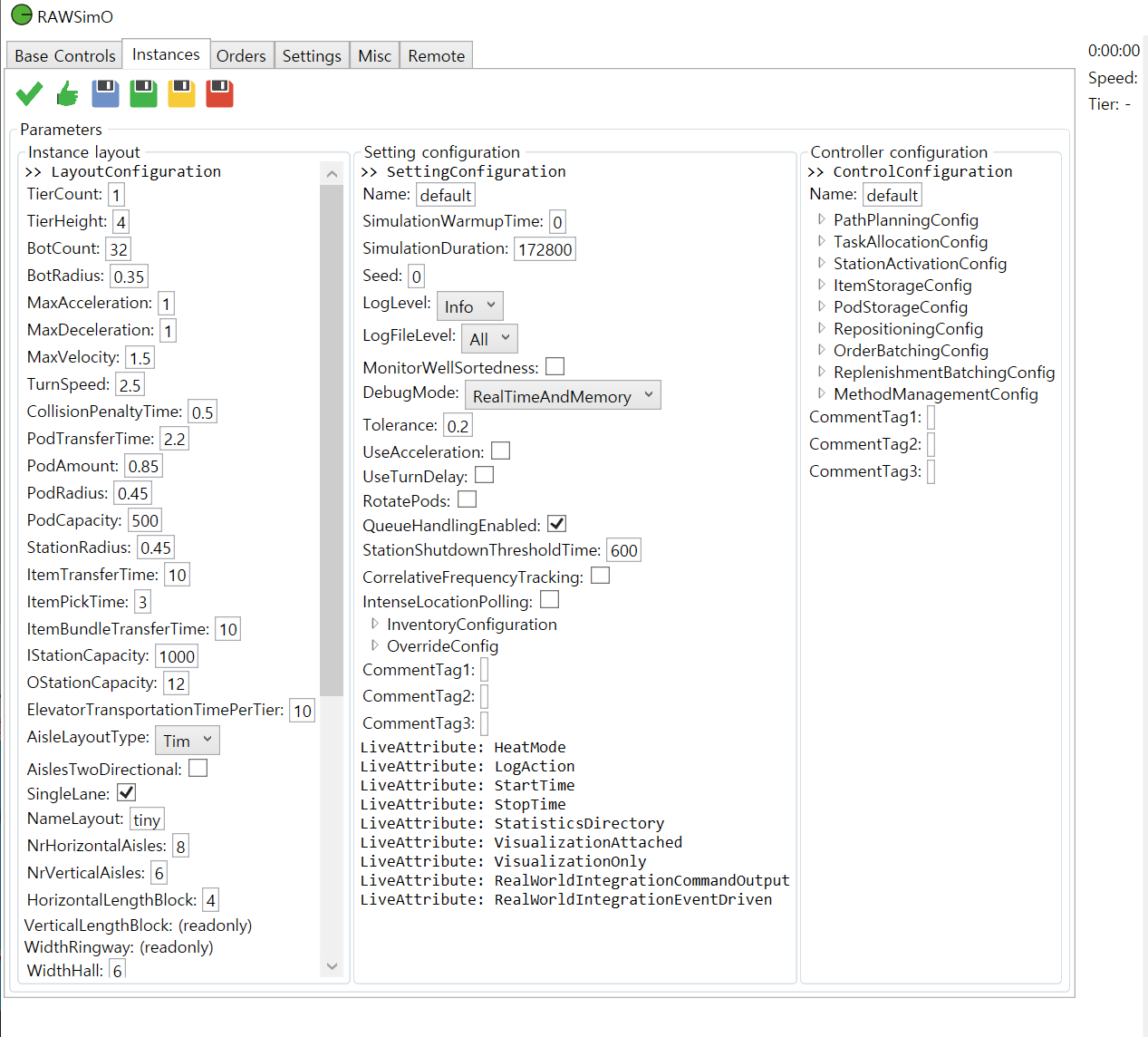
각종 파라미터를 설정할 수 있다.
- Instance Layout: 레이아웃관련 설정
예) station의 위치 지정이나 복도, 엘레베이터 등을 입력.
- Settings configuration: 창고 운영 시나리오 관련 값을 조정할 수 있다.
예) 오더 종류, 물품, 재고 구성, 시뮬레이션 기간, 수량 등
- Controller configuration: 알고리즘이나 전략 선택
예) 경로계획, Pod 이동 목적지 결정 등
(3) Orders
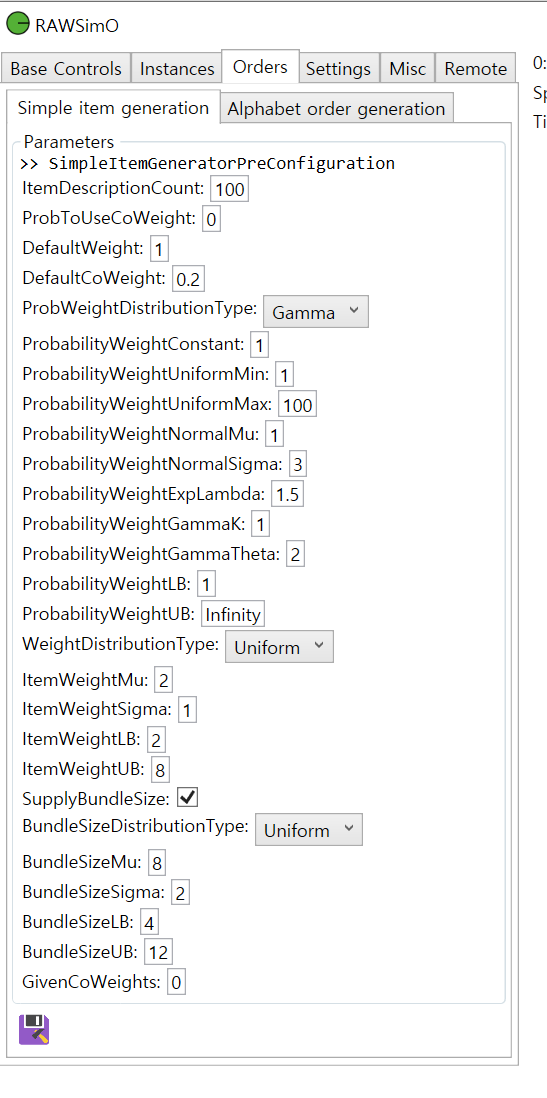
주문관련 통계 분포 설정
(4) Settings
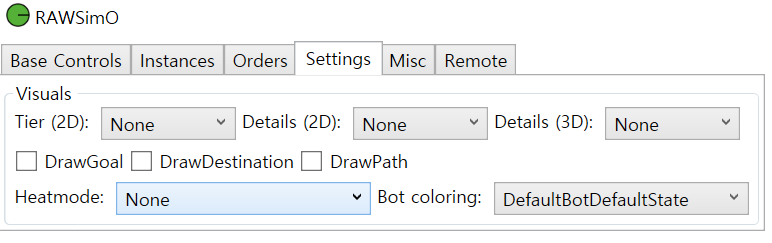
시뮬레이션 실행시 이동경로, 색상 등을 설정
(5) Misc
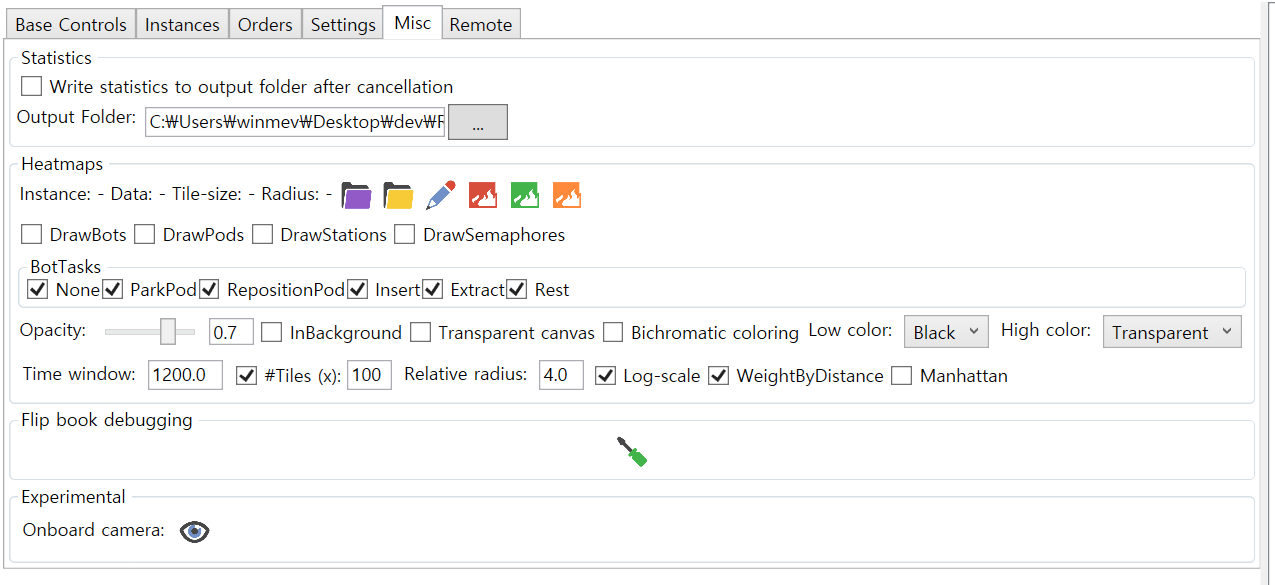
출력용 통계 데이터 위치 설정 및 히트맵 속성 설정
Top
4. 코드 분석
(1) Material: 시뮬레이션 구동을 위한 설정 파일 관리. resource폴더는 CLI(command line interface)를 사용하는 경우 필요.
(2) AppInputStation: 입고 장소
(3) AppOutputStation: 출고 장소
(4) AppRobot: 로봇
(5) AppServer: 서버
(6) CLI: 화면처리없이 터미널상으로만 처리하고 싶을 때 이용
(7) CommmFramework: 서버와 통신
(8) Core: 레이아웃, 경로계획, 3D모드 등 모든 핵심동작 처리
(9) DataPreparation: 데이터 전처리
(10) DEA: 분석 처리 (Data Envelopment Analysis)
(11) Hardware: 실제 로봇과 연동시 이용
(12) MDPSolve: 경로계획
(13) MultiAgentPathFinding: 경로계획
(14) Playground: 실험용 기능
(15) Toolbox: 공통함수
(16) Visualization: 화면단 담당, 버튼 클릭처리, rendering에서 3D 처
(17) VisualToolbox: 화면처리용 공통함수
참고
- 논문: https://arxiv.org/abs/1710.04726
- 코드: https://github.com/merschformann/RAWSim-O
-->
Comments